|
The laboratory has developed a number of integrated navigation systems for applications, including a GPS/INS integration system, an integrated vehicle navigation system, and an integrated attitude determination system. Selected recent publicationsChen, Wu, Li, Z.L., Yu, Meng and Chen, YQ. (2005). Effects of Sensor Errors on the Performance of Map Matching, Journal of Navigation, 2. Li, Zhilin and Ho, A. (2004). Design of Multi-scale and Dynamic Maps for Land Vehicle Navigation, The Cartographic Journal, 41(3):265-270. Chen, Wu, Yu, Meng, Li, Z.L. and Chen, YQ. (2003). Tight Integration of Digital Map and In-vehicle Positioning Unit for Car Navigation in Urban Areas, Wuhan University Journal of Nature Science, 8(N2B):551-556. Hu, Cong-wei, Chen, Wu, Chen, YQ., and Liu, Da-jie (2003). Adaptive Kalman Filter for vehicle navigation, Journal of Global Positioning Systems, 2(1):42-47. Sun, Yong-rong, Liu, Jian-ye and Chen, Wu (2003). Motion Compensator for an airborne SAR system, Chinese Space Science and Technology, 23(5):28-32. Sun, Yong-rong, Liu, Jian-ye, Chen, Wu and Chen, YQ. (2003). “SAR Motion Information Sensor Based on GNSS/SINS” , Transactions of Nanjing University of Aeronautics & Astronautics, 20(2):172-177. Yu, Meng, Chen, Wu, Li, Z.L., Chen, YQ., and Chao, J. (2002). A Simplified Map Matching Algorithms for In Vehicle Navigation Unit, Geographic Information Sciences, 8(1). Chao, J., Chen, YQ., Chen, Wu, Ding, X.L., Li, Z.L., Wang, N. and Yu, M. (2001). An experimental Investigation into the performance of GPS based Vehicle Positioning in Very Dense Urban Areas, Journal of Geospatial Engineering, 3(1):59-66.
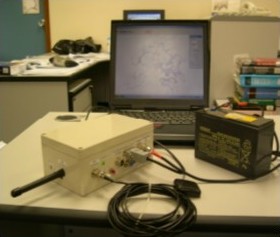
Selected projects on Integrated Navigation SystemsIntegrated Navigation Units CHEN Wu and CHEN Yong-qi Locating a car on a road map is one of the important functions of a car navigation system. Currently, GPS is widely used for vehicle navigation due to its high accuracy and low cost. However, in an urban environment, the availability of GPS is severely reduced due to the blocking of satellite signals by buildings and other obstructions. In urban Hong Kong GPS availability is less than 30%. An integrated vehicle navigation system (Figure 15) that integrates GPS, Dead Reckoning (DR), radio beacons, and digital map and navigation databases, has been developed. The system includes a number of new techniques developed by the research team in the department, including adaptive Kalman filter for sensor integration, tight integration of map and positioning sensors, and Bluetooth-based radio beacon (Figure 16). With the integrated system, positioning availability increases to over 96% in Hong Kong urban areas.
Figure 15. Integrated Vehicle Navigation System
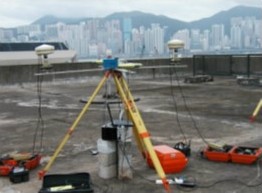
Figure 16. Bluetooth Roadside beacon Also the laboratory has developed an integrated navigation system with GPS and MEMS IMU (Figure 17). This system can provide both position and attitude information for remote sensing applications. To improve the heading accuracy, a multiple antenna GPS system is also developed that directly observes the attitude to improve the long term stability of MENS IMU. This system can be used to compensate motions of vehicles for a number of remote sensing applications, such as airborne SAR and multi-beam echosounder.
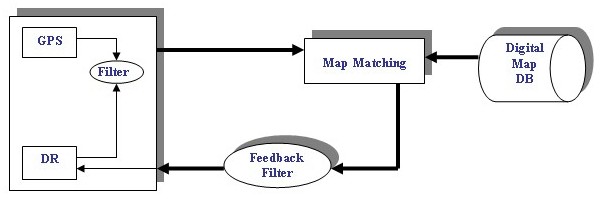
Figure 17. Integrated GPS/MEMS INS system Map-matching for vehicle navigation CHEN Wu, LI Zhi-lin and CHEN Yong-qi This research is supported by a number of projects from government, industry, research council, and the university. A new map-matching method is developed that can be implemented in different platforms. The map-matching method consists of a number of basic functions, such as road identification, road following, road feature extraction, and reliability assessment. The precise map information has also been integrated with the navigation units to provide calibration for the DR errors.
Figure 18. Integration of Map-matching process with a navigation unit
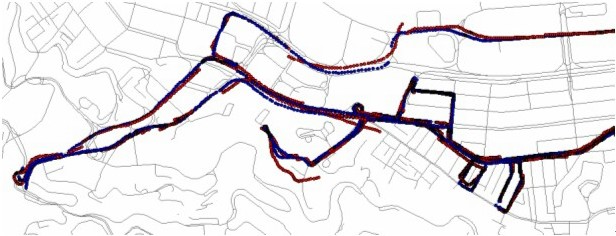
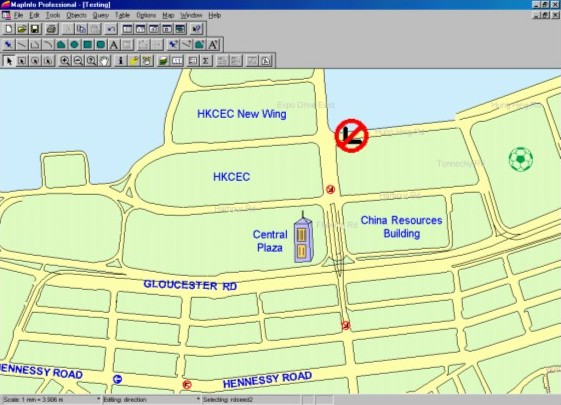
Figure 19. Performance of Map-matching in an area where GPS is rarely available, (red line: GPS/DR output, blue line: Map-matching result) Design of Effective Dynamic Maps for Land Vehicle Navigation Zhilin LI The main requirement of maps for navigation purpose is effectiveness. Experimental results in psychology indicate that it is dangerous for the driver to leave his/her attention away from the road for more than a few seconds. To make maps effective, general-purpose maps should be greatly simplified because too much information on the map would confuse the driver. Furthermore, map symbols critical for navigation should be more attractive than symbols for the surrounding environment. The aim is to achieve optimum design of effective maps for land vehicle navigation. Effective use of visual variables (shape, size, orientation and color), dynamic variables (duration, change of rate and order), and exploration acts (blink, highlight, zooming, pan, drag and click) in dynamic visualization are explored, and maps with different complexity and perspective points are designed and experimentally tested in Hong Kong.
Figure 19. Use of land marks and highlighted symbols for vehicle navigation This project integrates geographic information systems (GIS) technology with vehicle routing methodology in order to develop a more effective solution to fleet management in a dynamic environment. In order to achieve this, the following objectives have to be realized: To establish a comprehensive GIS data model for logistics; To develop an efficient algorithm for dynamic vehicle routing; To develop a software prototype — an integrated GIS and routing models; and To test and verify the solutions based on real data sets in Hong Kong. |