Laboratory for Smart City and Spatial Big Data Analytics
Lightweight Seamless 3D Indoor Mapping and Post-Processing
Our research aim is to develop a lightweight seamless 3D spatial data acquisition system as well as a 3D spatial data post-processing software toolkit.
Lightweight seamless 3D spatial data acquisition system
Multi-sensor:the system synergizes 3D LiDAR, panoramic camera, and 3D compass to ensure the accuracy and completeness of the data capture. Multi-source point clouds with flexible and higher resolution, high precision (centimeter-level), and high reliability can be captured via the platform. The multi-source point clouds contain detailed objects and textures for indoor environment identification and modelling.
Lightweight:the system employs exclusive multiple-sensor integration to replace the traditional inertial measurement unit (IMU). The backpack platform has reduced weight due to the new material used for fabrication.
Seamless:the data acquisition can switch seamlessly between various indoor and outdoor environments, with no need for reconfiguration.
Reliable:the system utilizes advanced simultaneous localization and mapping (SLAM) technology. Highly suitable for densified urban environments like Hong Kong and indoor environments, the technology can be used to acquire high-precision 3D models with reduced number of ground control points.
Rapid data collection:a new data acquisition platform is needed to fill the gap between the relatively slow traditional laser scanning system and increasing demand for rapid geospatial data collection in indoor, outdoor, underground and even hazardous environments. The lightweight seamless 3D spatial data acquisition system is a good answer to the call for fast and flexible data acquisition.
Complete documentation:complete documentation of environment can be collected by this data acquisition system. This platform contains laser scanner, digital video camera, on-board processing devices, internal communication cables and power supply, which can collect range data and image data from surrounding. It synchronizes imagery and point cloud data, therefore assuring a complete documentation of environment.
3D spatial data post-processing software toolkit
Accurate positioning and model building:the software realizes progressive professional indoor 3D model construction. The used of SLAM technology enables accurate positioning and 3D model building. The imagery and point cloud data are both used for 3D model building, which can make up for the defect of single data sources.
Application areas:this platform can be used in various situations, for example, data capture for smart city building, smart transportation system, underground pipeline management system; landscape scanning and modeling before entering emergency sites, in order to enhance rapid decisions in disasters and reduce unnecessary casualties, and so on.

Novel methods developed by our team for 3D Indoor Mapping
Plane Extraction from Low-Resolution Inhomogeneous Point Clouds
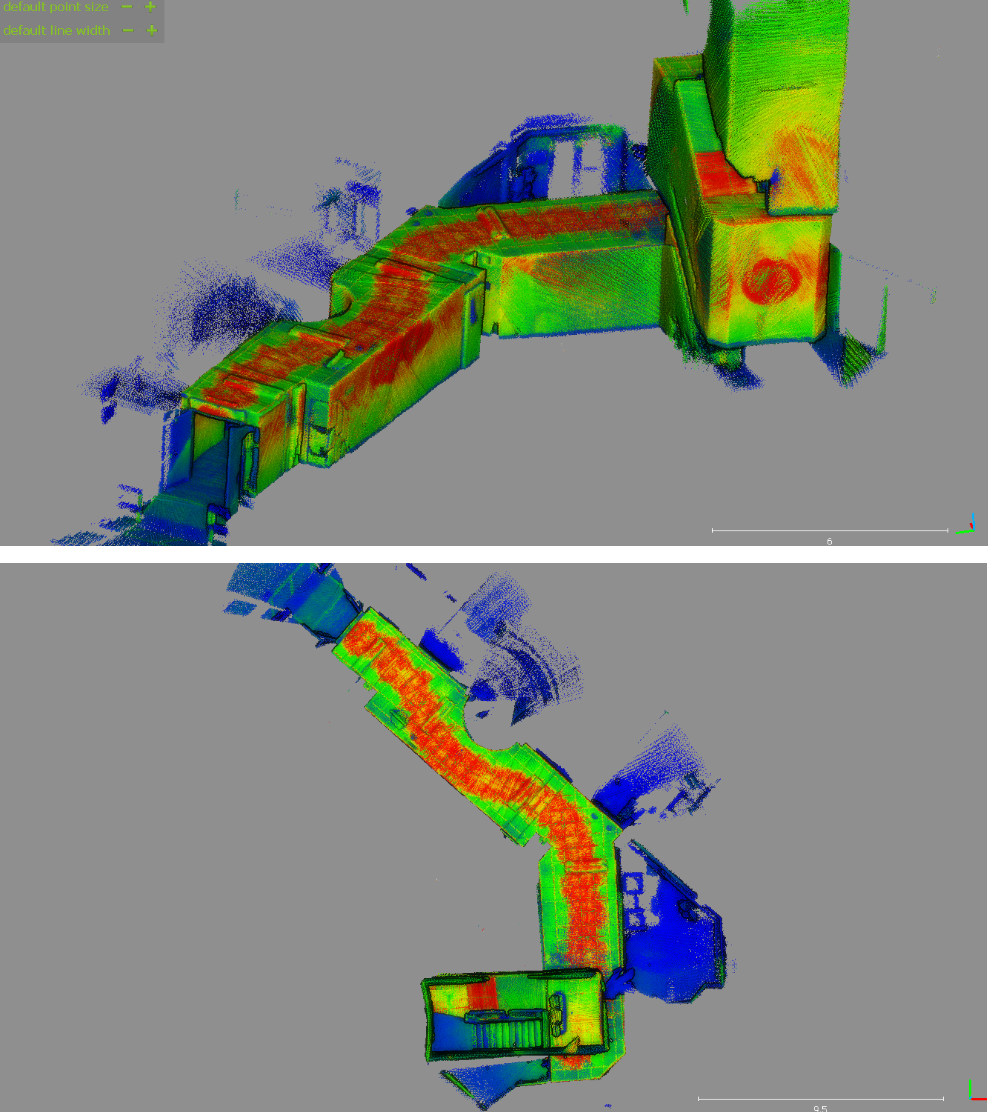
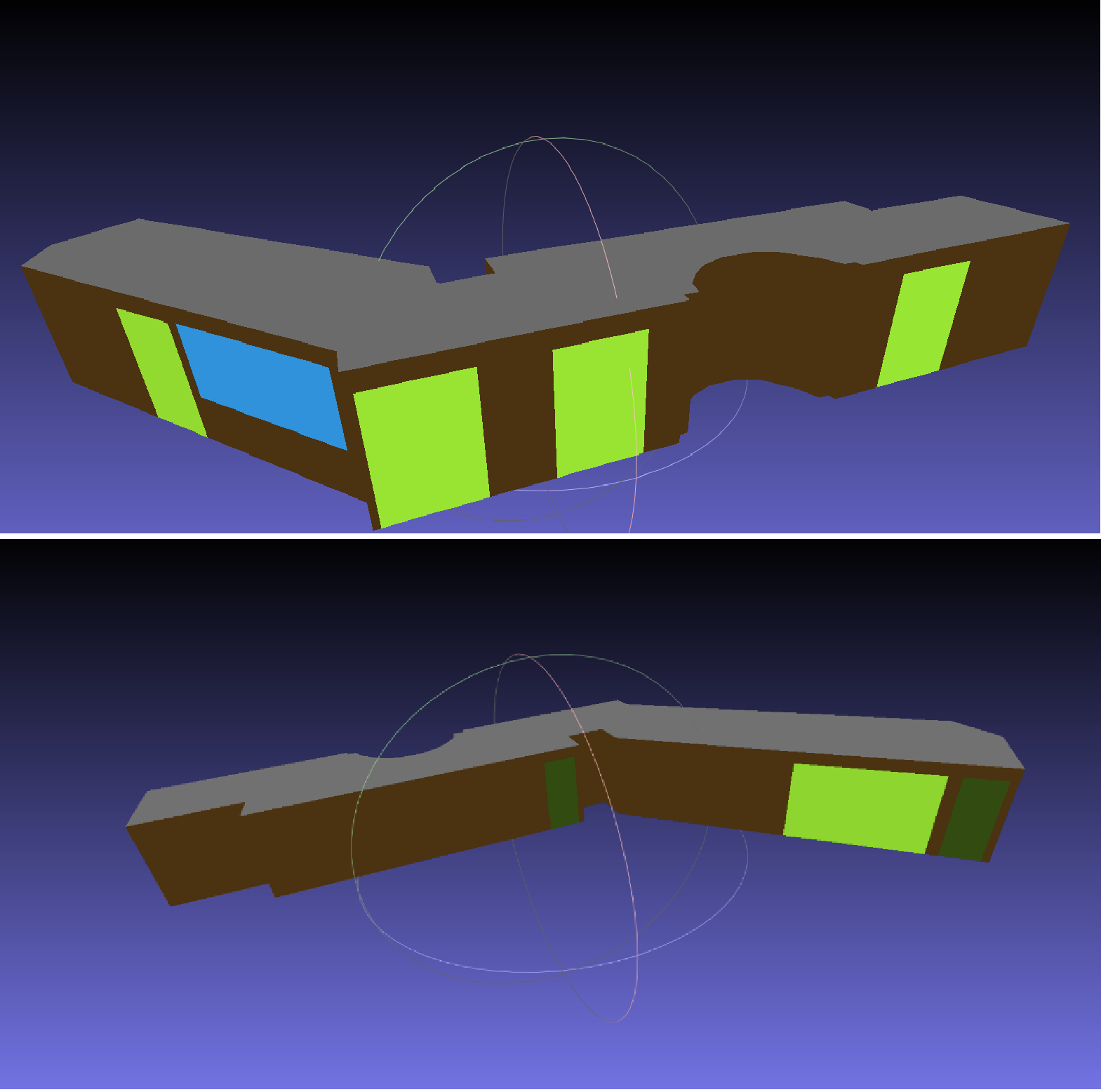
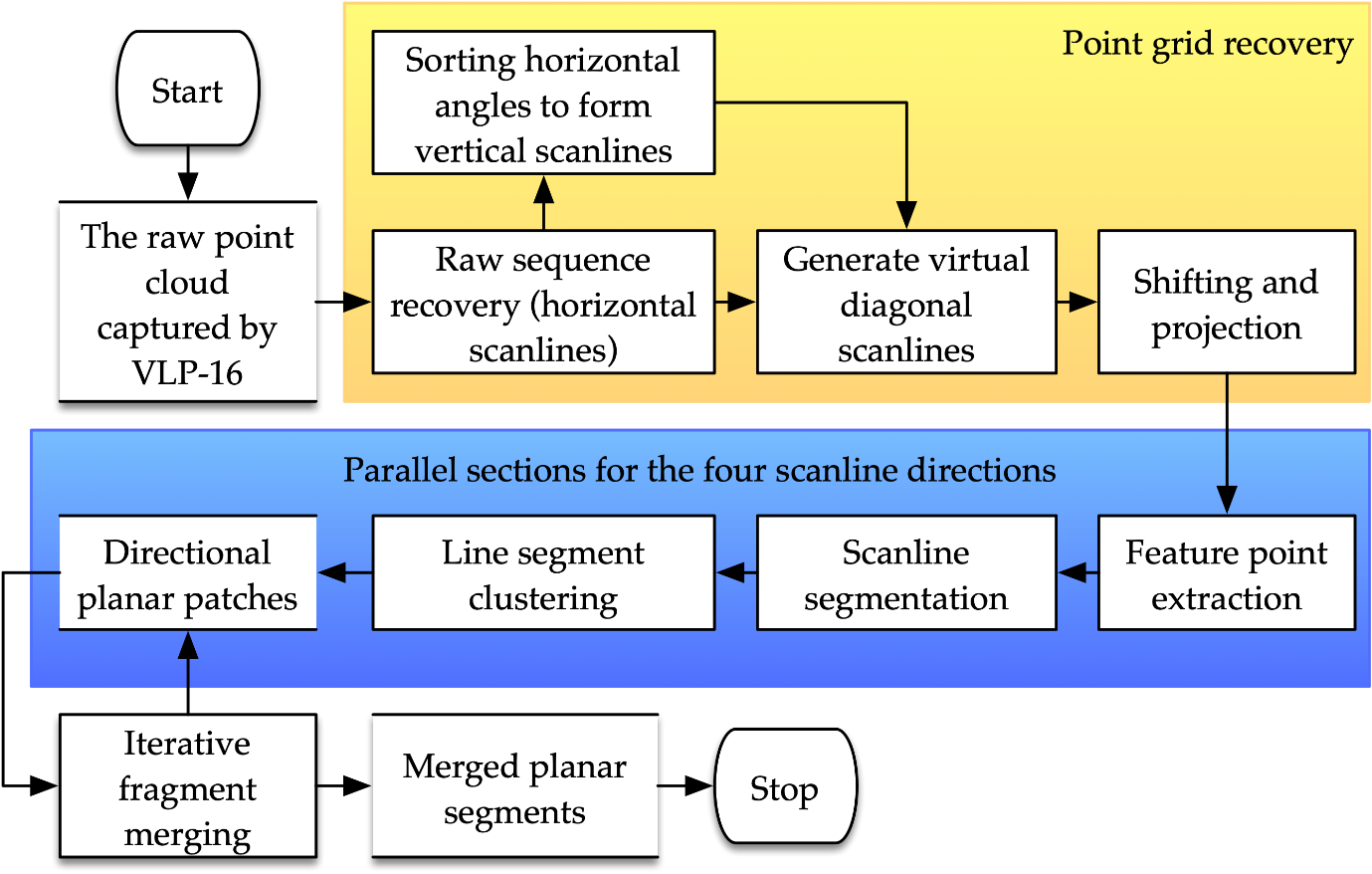
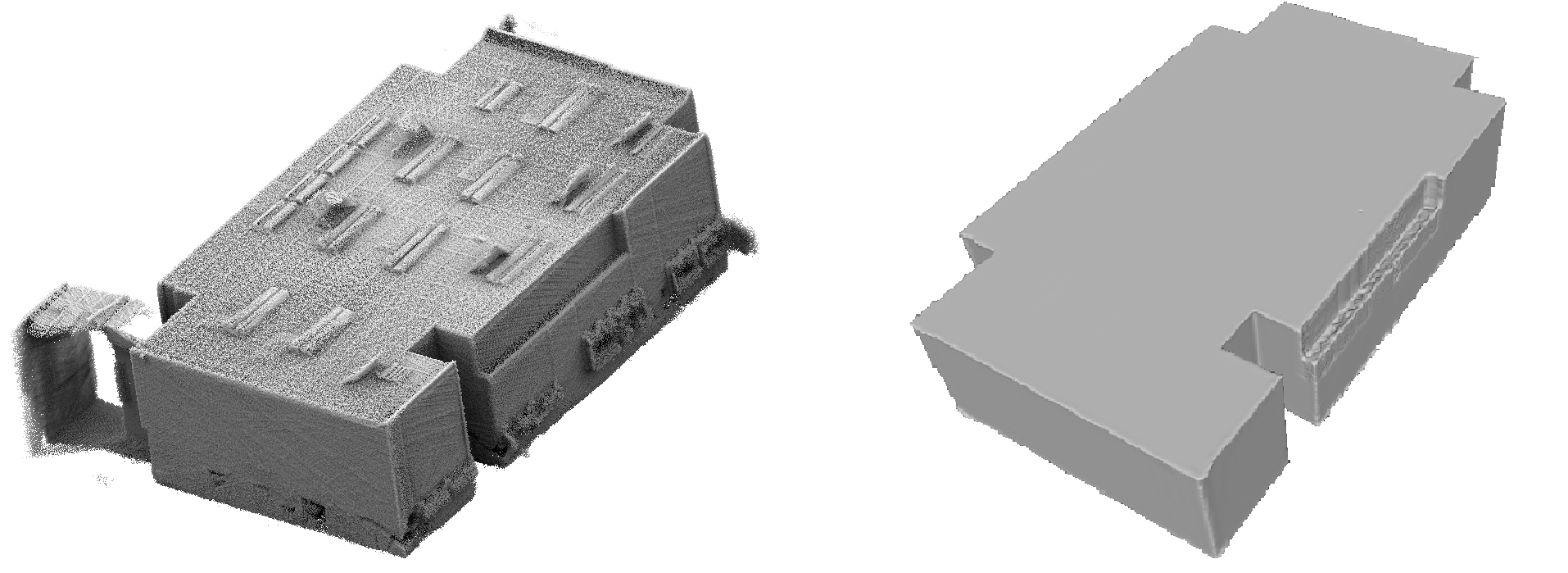
Over the last decade, increasing demands for building interior mapping have brought the challenge of effectively and efficiently acquiring geometric information. Most mobile mapping methods rely on the integration of Simultaneous Localization And Mapping (SLAM) and costly Inertial Measurement Units (IMUs). Meanwhile, the methods also suffer misalignment errors caused by the low-resolution inhomogeneous point clouds captured using multi-line Mobile Laser Scanners (MLSs). While point-based alignments between such point clouds are affected by the highly dynamic moving patterns of the platform, plane-based methods are limited by the poor quality of the planes extracted, which reduce the methods’ robustness, reliability, and applicability. To alleviate these issues, we proposed and developed a method for plane extraction from low-resolution inhomogeneous point clouds. Based on the definition of virtual scanlines and the Enhanced Line Simplification (ELS) algorithm, the method extracts feature points, generates line segments, forms patches, and merges multi-direction fractions to form planes. The proposed method reduces the over-segmentation fractions caused by measurement noise and scanline curvature. A dedicated plane-to-plane point cloud alignment workflow based on the proposed plane extraction method was created to demonstrate the method’s application. The implementation of the coarse-to-fine procedure and the shortest-path initialization strategy eliminates the necessity of IMUs in mobile mapping. A mobile mapping prototype was designed to test the performance of the proposed methods. The results show that the proposed workflow and hardware system achieves centimeter-level accuracy, which suggests that it can be applied to mobile mapping and sensor fusion.
- [1] Shi, W. & Fan, W., Plane extraction method, system, device and storage medium based on point cloud data. P.R. China Patent application 201811167642.5.
- [2] Fan, W., Shi, W., Xiang, H., & Ding, K. (2019). A Novel Method for Plane Extraction from Low-Resolution Inhomogeneous Point Clouds and its Application to a Customized Low-Cost Mobile Mapping System. Remote Sensing, 11, 2789.
- [3] Shi, W., Ahmed, W., Li, N., Fan, W., Xiang, H., & Wang, M. (2018). Semantic Geometric Modelling of Unstructured Indoor Point Cloud. ISPRS International Journal of Geo-Information, 8(1), 9.
- [4] Fan, W., & Shi, W. (2015). Feature Point Extraction Using Extended 2D Line Simplification Algorithm for Indoor Mapping. In The 9th International Symposium on Mobile Mapping Technology, MMT2015. Sydney, Australia.
Semantic Indoor Geometric Modeling Approach (SIGMA):
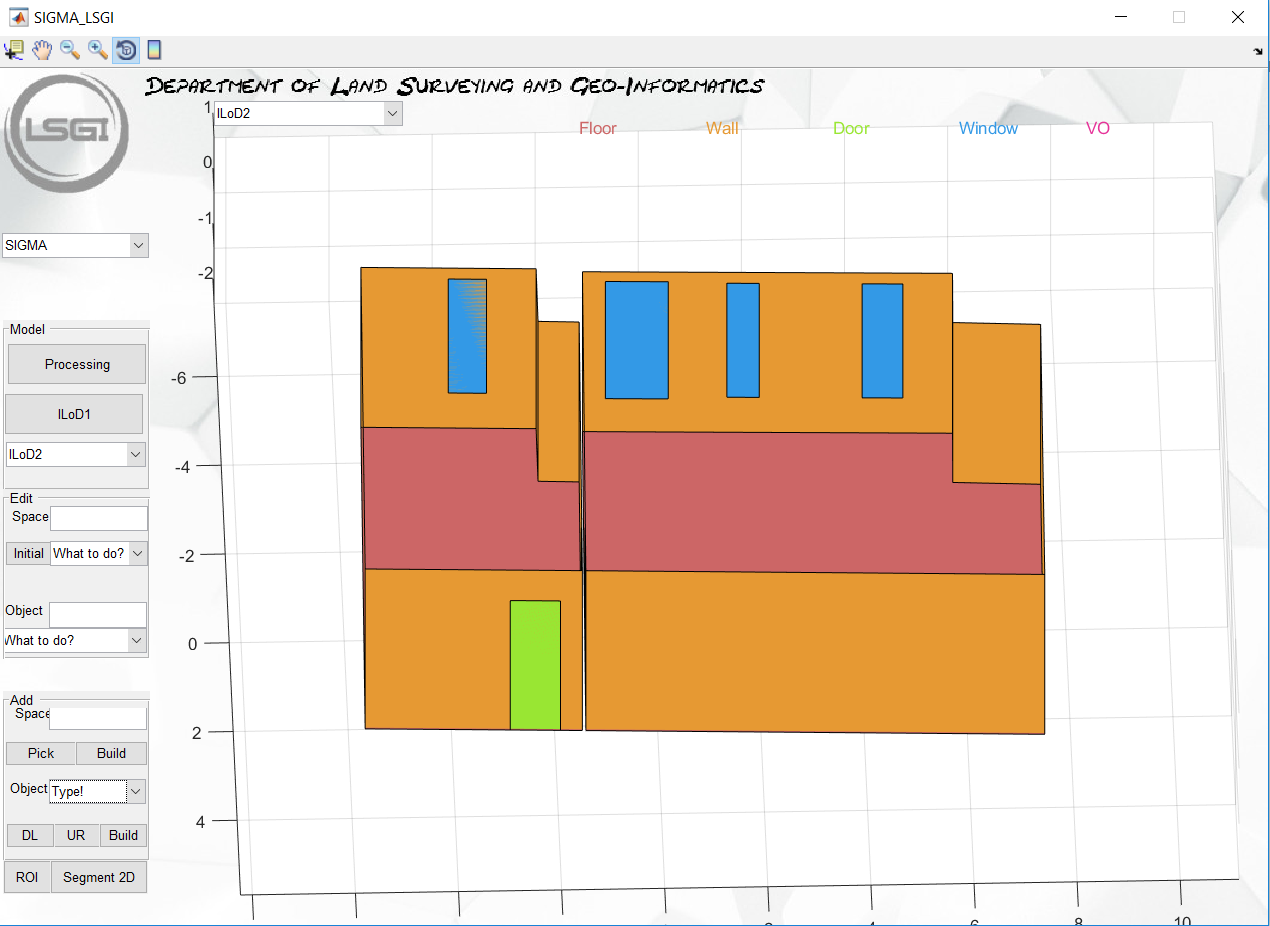
Three-dimensional models of interior structures are highly desired and attract the attention of several scholars. Accurate and high-quality indoor models are necessary and required for several applications such as construction planning & monitoring, and facility management, indoor location-based services, energy simulation models, augmented reality, and virtual reality. In addition, the reconstruction of such models reduces the amount of data for quickly transfer and generates semantic information for different structural elements. We designed an application “SIGMA” for the reconstruction of complex layout structure. Its main contribution is introducing an automatic surface-based modelling approach. The data input is a spatial point cloud of a single story without any restrictions on the data or the layout. Moreover, our approach supports the modelling of interior structures with different floor levels. An edge-based editing module enhances the model for a robust reconstruction of interior structures.
- [1] US Patent No. 16/226,751: "3D indoor modelling method, system and device based on point cloud data", 20 December 2018, Shi, W.; Ahmed W.
- [2] Chinese Patent application No. 201811167619.6: " Semantic Indoor Geometric Modeling Approach (SIGMA)”, 8 October 2018, Shi, W.; Ahmed W.
- [3] Shi, W.; Ahmed, W.; Li, N.; Fan, W.; Xiang, H.; Wang, M., Semantic Geometric Modeling of Unstructured Indoor Point Cloud, ISPRS International Journal of Geo-Information, vol. 8, issue 1, 2019.
- [4] Ahmed, W.; Shi, W.; "Indoor 3D building Modeling Reconstruction from Unstructured Point Cloud", International Graduate Workshop on Geoinformatics, Wuhan, China, 26-28, June 2019.
Structural Elements Detection and Reconstruction (SEDR) Approach:
Accurate and high-quality 3D indoor models are widely used in many applications, such as construction planning and monitoring, indoor location and navigation, and virtual reality. Therefore, the 3D model of indoor scenes should be generated and be updated timely in the whole close-loop lifecycle of a building. Point cloud is one of the available datasets to generate the 3D indoor model. However, current practice in model generation still demands manual or interactive process, which is time-consuming and requires specific skills. The key challenge is to automatically reconstruct the model of indoor scenes. We proposed the approach called SEDR (Structural elements detection and reconstruction) automatically reconstructs the complete structure elements of ceiling, walls, and floor from point clouds without any trajectory or prior knowledge, and the structure are not required to conform to the Manhattan-world assumption.
- [1] Chinese Patent application No. 201910967622.4: " An approach, device, and terminal equipment of indoor modeling”, 12 October 2019, Shi, W.; Wu K.