智慧城市與空間大數據分析實驗室
輕量級無縫三維室內測圖及數據後處理
我们的研究目標是實現輕量級的無縫三維空間數據獲取系統,以及相應的三維空間數據後處理軟件工具。
輕量級無縫三維空間數據獲取系統
多傳感器:該系統整合了三維LiDAR、相機和三維羅盤,確保了獲取周圍環境數據的完整性和準確性。通過平台可以採集到高分辨率、高精度(厘米級)、高可靠性的多源點雲數據,數據包含豐富的目標和紋理信息,便於場景識別和環境建模的實現。
輕量級方案:使用外部多傳感器融合,取代了傳統的慣性測量裝置,並且在數據採集設備中採用新型材料,以減輕設備的重量。
無縫性:為室內外數據採集提供無縫的解決方案,無需重新設置,即可採集不同環境的數據。
可靠性:採用先進的同步定位預測圖技術,該技術非常適於高密度的香港城市環境及室內環境,可以獲取高精度的三維模型,並且減少對地面控制點的依賴。
快速數據採集:用戶對室內、室外、地下環境、甚至是危險區域的快速數據採集需求日益增長。我們需要新型的數據採集設備,來解決傳統數據採集方式效率較低的缺陷。輕量級三維無縫空間數據獲取系統可以有效地解決這一問題,它可以靈活、快速地獲取周圍環境的數據。
三維空間數據後處理軟件工具
精確定位和模型構建:該軟件可以進行專業的室內三維模型構建。同步定位與測圖技術能夠實現精確的定位和三維模型構建,同時,建模採用協同整合的影像數據和點雲數據,以彌補單一數據的缺陷。
應用領域:該方案具有广泛的應用價值,例如:為智慧城市建設、智慧交通系統和地下管線管理系統提供數據基礎支持;在進入險情之前對區域進行快速場景數據獲取,為救災決策提供支持,并避免不必要的人員傷亡。在農林行業,礦業量測中,由於測量環境的特殊性,移動測量背包以其輕便性和靈活性被廣泛地採用。

本團隊研發的三維室內測圖數據後處理新方法
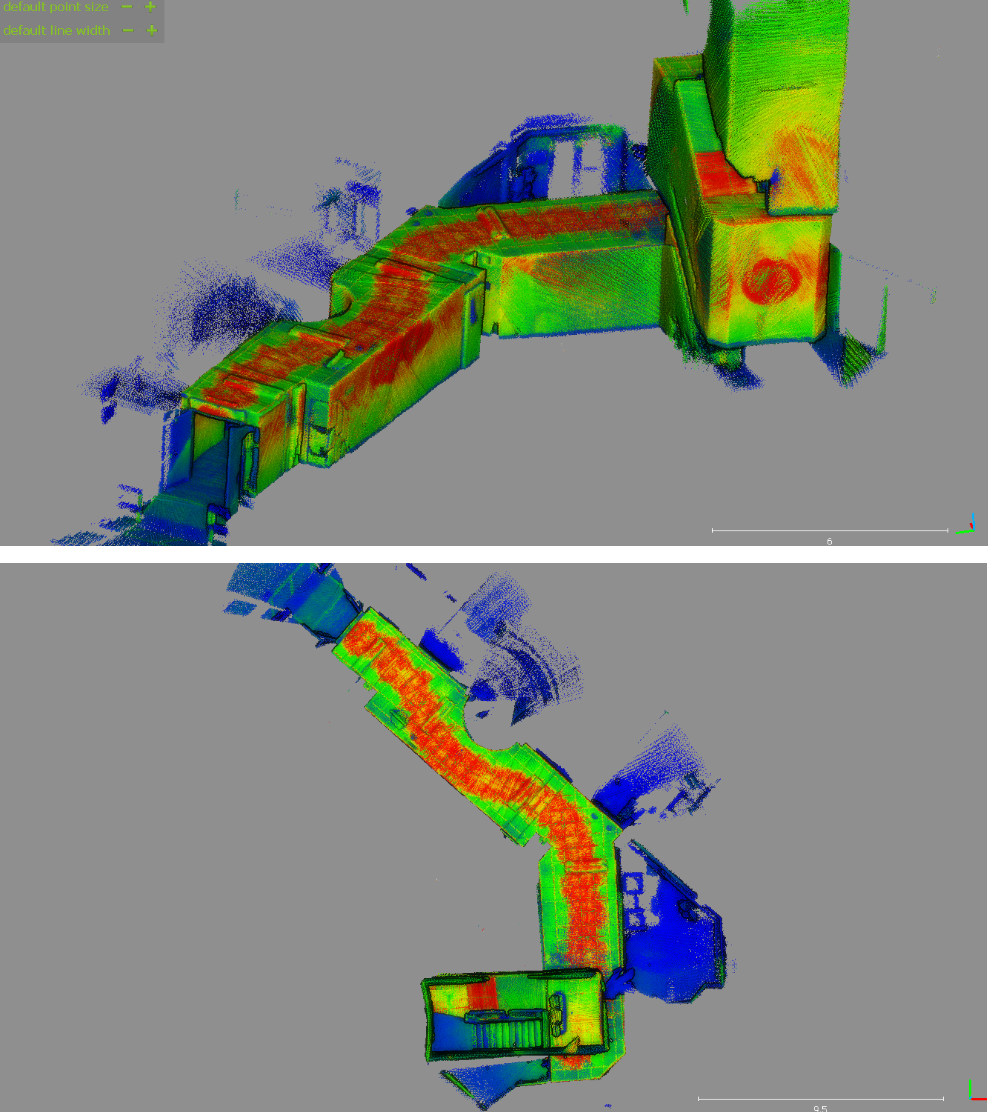
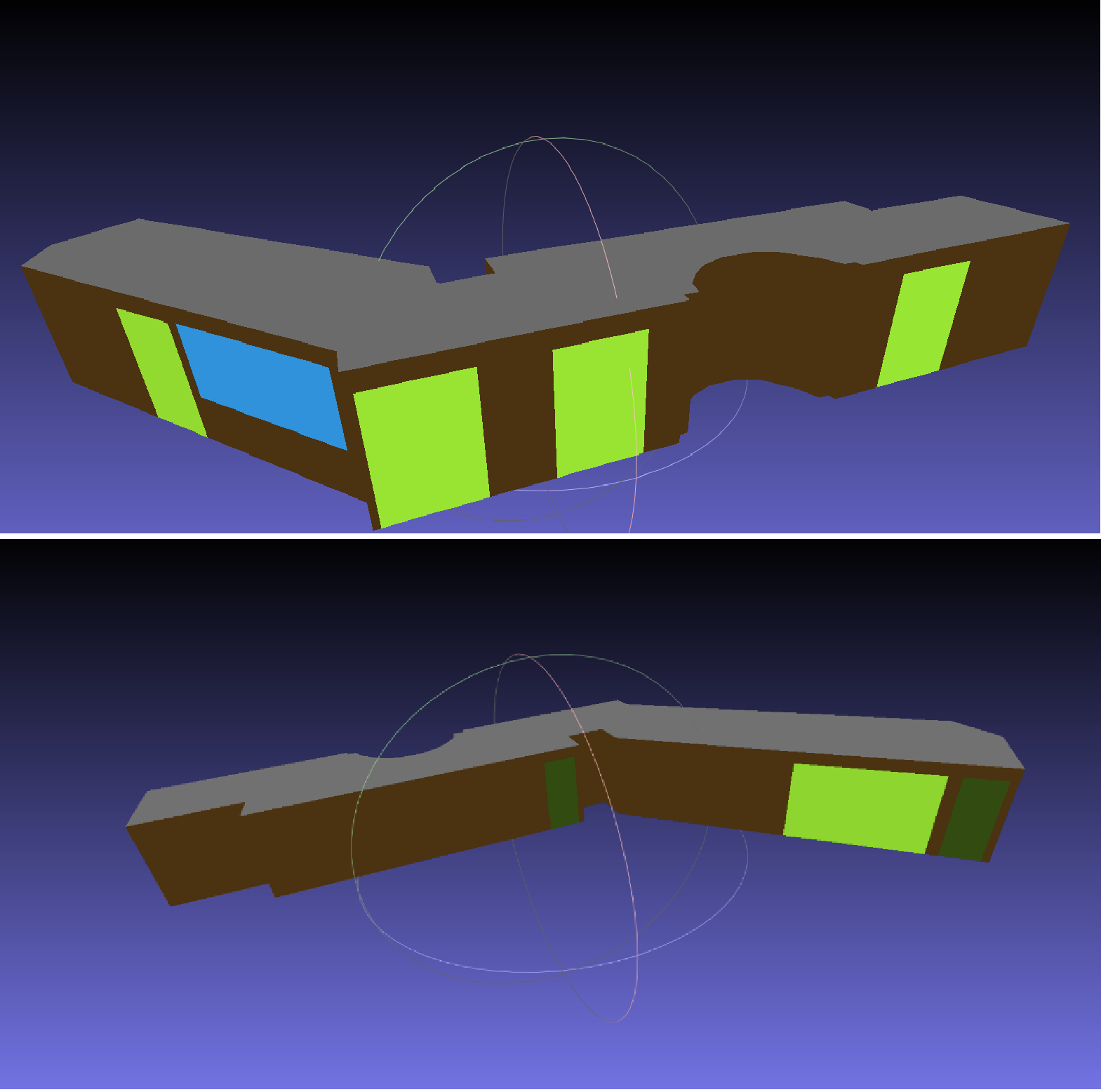
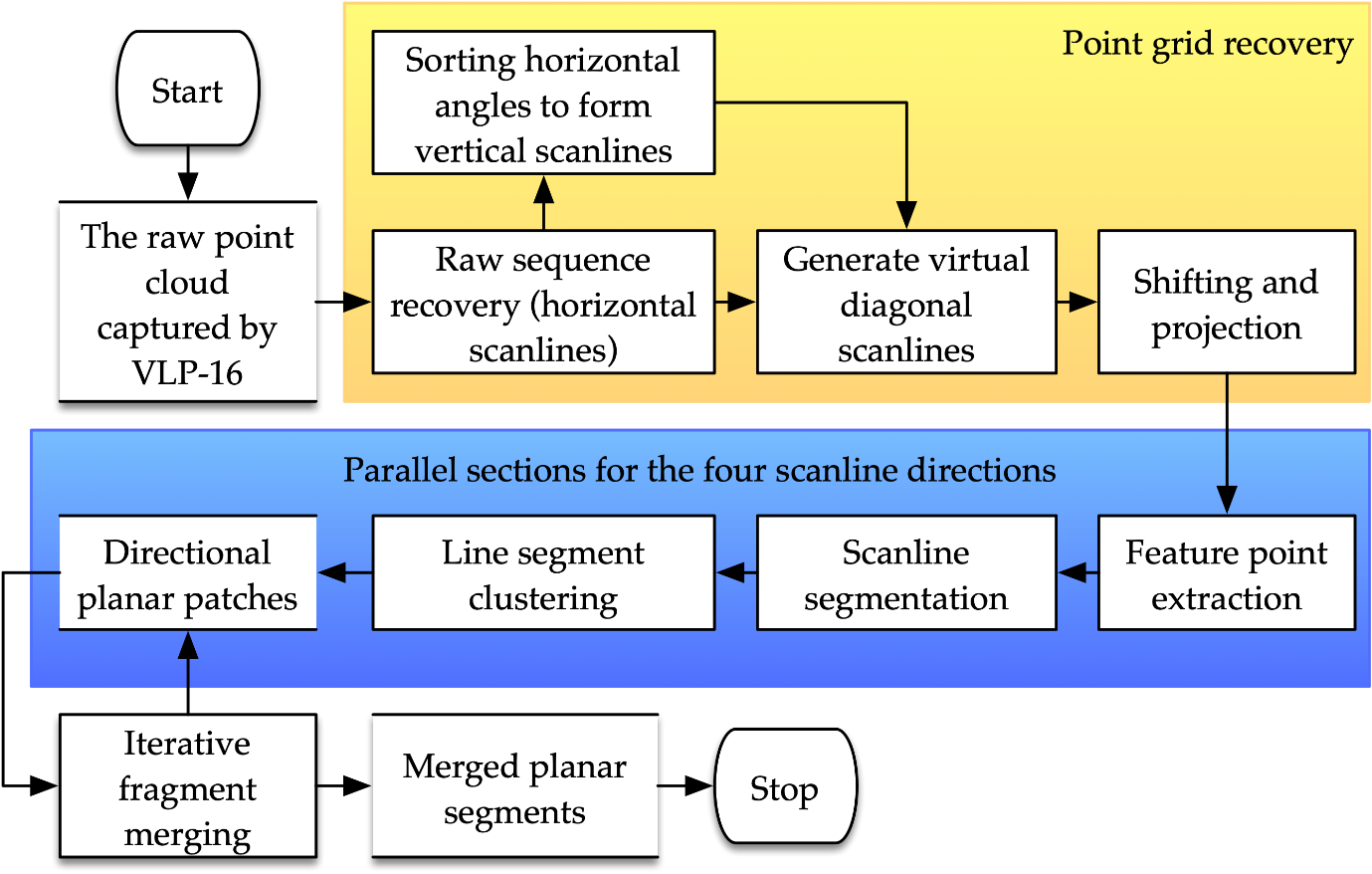
低分辨率不均勻點雲的平面提取
在過去的十年中,對建築內部地圖的不斷增長的需求帶來了有效地獲取幾何信息的挑戰。大多數移動製圖方法都依賴於同時定位和製圖(SLAM)和昂貴的慣性測量單元(IMU)的集成。同時,由於使用多線移動激光掃描儀(MLS)捕獲的點雲分辨率較低且不均勻,這些方法還存在配準誤差。此類點雲之間的基於點的配准方法受平台的高度動態移動模式影響,而且基於平面的方法也受到提取的平面質量差的限制,這降低了方法的魯棒性,可靠性和適用性。為了緩解這些問題,我們提出並開發了一種從低分辨率不均勻點雲中提取平面的方法。基於虛擬掃描線的定義和增強線簡化(ELS)算法,該方法提取特徵點,生成線段,形成面片,並合併多方向面片以形成平面。該方法減少了由測量噪聲和掃描線曲率引起的過度分割。基於該平面提取方法,一種專用的基於平面的點雲配准工作流程被用以演示該方法的應用。由粗到精的過程和最短路徑初始化策略的實現消除了移動測圖中IMU的必要性。一個移動測圖原型被用以測試所提出方法的性能。結果表明,所提出的工作流和硬件系統達到了厘米級的精度,這表明它可以應用於移動製圖和傳感器融合。
相關專利與研究發表:
- [1] Shi, W. & Fan, W., Plane extraction method, system, device and storage medium based on point cloud data. P.R. China Patent application 201811167642.5.
- [2] Fan, W., Shi, W., Xiang, H., & Ding, K. (2019). A Novel Method for Plane Extraction from Low-Resolution Inhomogeneous Point Clouds and its Application to a Customized Low-Cost Mobile Mapping System. Remote Sensing, 11, 2789.
- [3] Shi, W., Ahmed, W., Li, N., Fan, W., Xiang, H., & Wang, M. (2018). Semantic Geometric Modelling of Unstructured Indoor Point Cloud. ISPRS International Journal of Geo-Information, 8(1), 9.
- [4] Fan, W., & Shi, W. (2015). Feature Point Extraction Using Extended 2D Line Simplification Algorithm for Indoor Mapping. In The 9th International Symposium on Mobile Mapping Technology, MMT2015. Sydney, Australia.
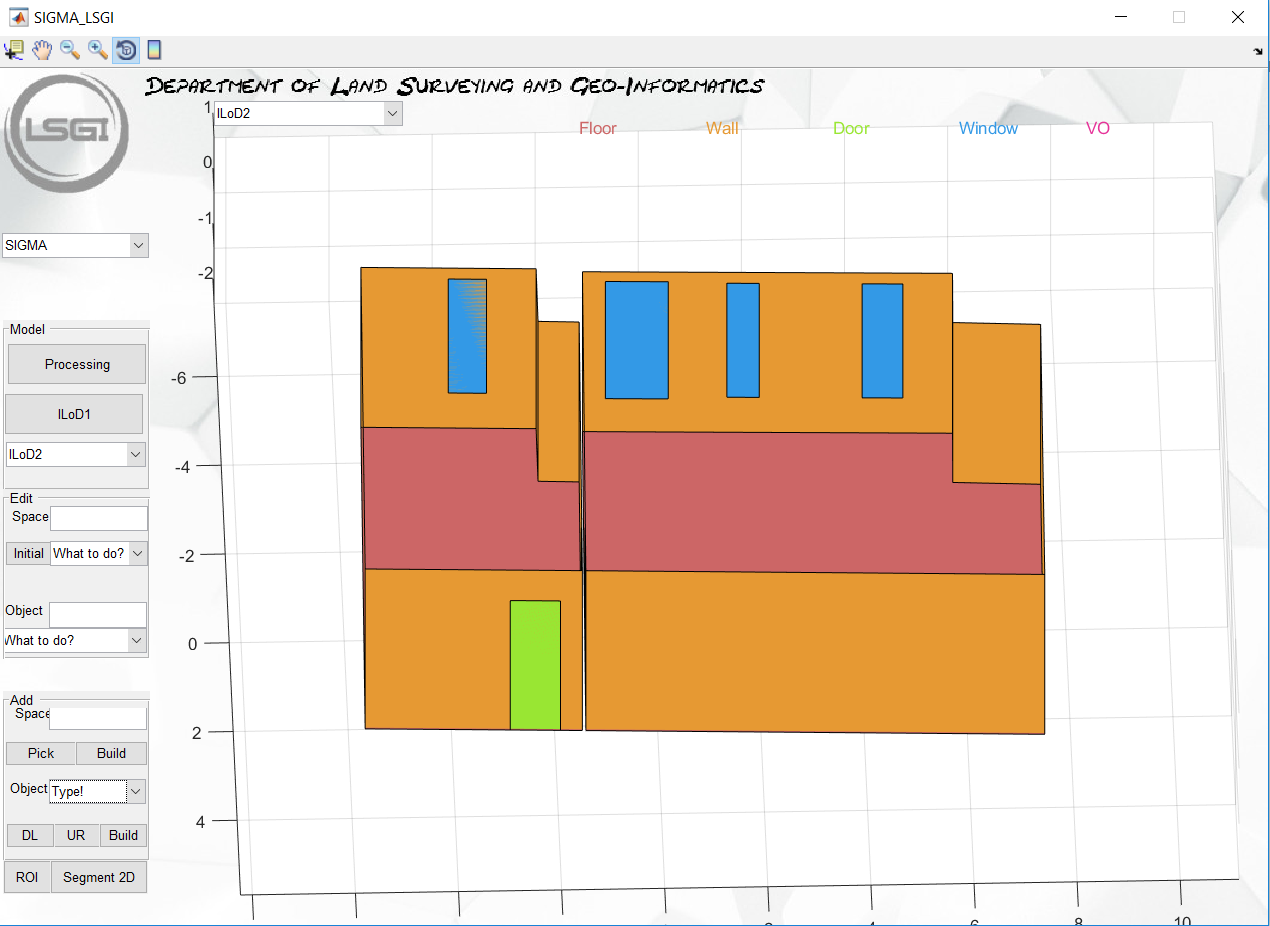
室內語義建模方法
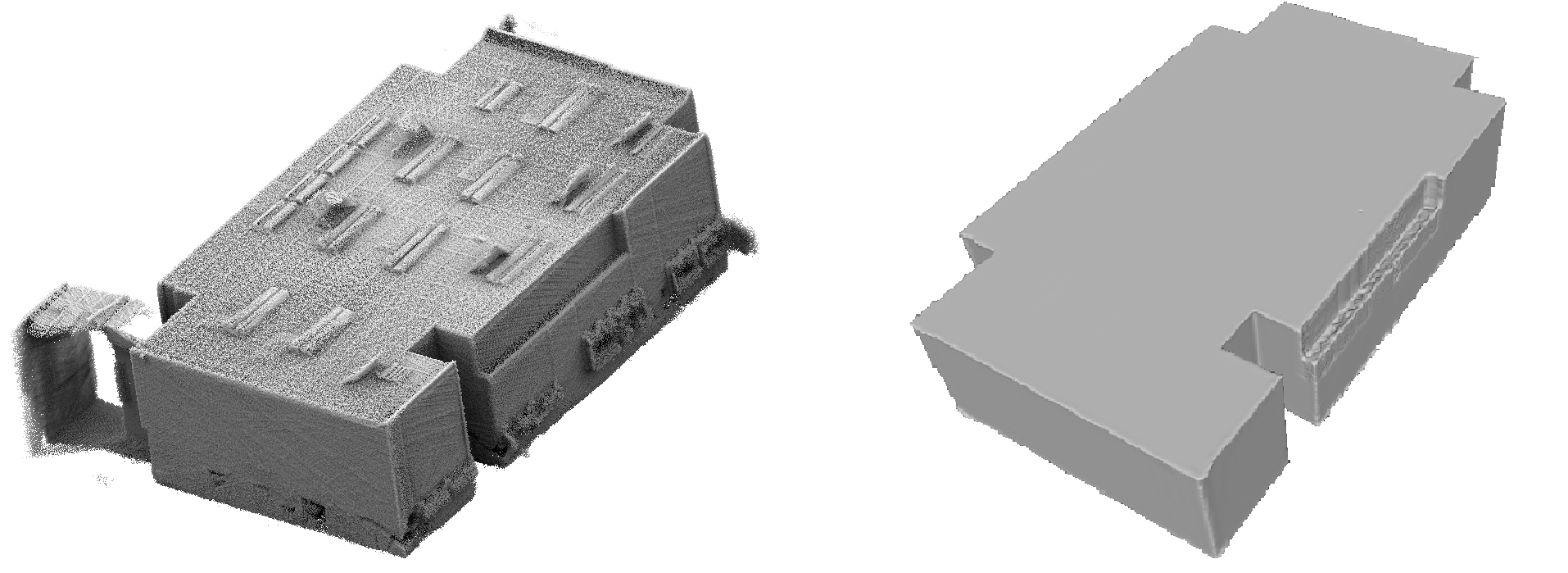
三維室內結構模型不僅有著較強的市場需求,也是學術研究的熱點。精確且高品質的室內模型被廣泛應用在建築規劃與監理、物業精細管理、室內基於位置的服務、能源模擬模型、增強現實和虛擬實境中。並且重建的模型也簡化了描述室內結構元素所需要的資訊,利於資料傳輸。我們設計並開發了這款室內語義建模應用,可以自動的進行基於平面的模型構建。此應用的輸入資料是不依賴其他附加資料且不加其他資料或室內結構限制的點雲資料,並且可處理多樓層點雲資料。基於邊界的編輯模組也增強了應用處理複雜結構的魯棒性。
相關專利與研究發表:
- [1] US Patent No. 16/226,751: "3D indoor modelling method, system and device based on point cloud data", 20 December 2018, Shi, W.; Ahmed W.
- [2] Chinese Patent application No. 201811167619.6: " Semantic Indoor Geometric Modeling Approach (SIGMA)”, 8 October 2018, Shi, W.; Ahmed W.
- [3] Shi, W.; Ahmed, W.; Li, N.; Fan, W.; Xiang, H.; Wang, M., Semantic Geometric Modeling of Unstructured Indoor Point Cloud, ISPRS International Journal of Geo-Information, vol. 8, issue 1, 2019.
- [4] Ahmed, W.; Shi, W.; "Indoor 3D building Modeling Reconstruction from Unstructured Point Cloud", International Graduate Workshop on Geoinformatics, Wuhan, China, 26-28, June 2019.
結構元素檢測與建模方法:
精確與高品質的三維室內模型被廣泛的應用在建築設計與監理、室內定位導航和VR等場景,因此三維室內模型應當在其生命週期中進行構建且及時更新。點雲資料是生成室內模型的重要資料來源,而現階段通過點雲資料進行構建模型仍需要手動進行或者需要半自動的交交交交交互操作。這些操作均耗時且需要專業技能才能完成,因此現階段的關鍵問題仍是自動化的重建模型。我們提出了結構元素檢測與建模方法可自動的完成室內完整結構包括天花板、地板和牆面的重建,且不需要附加採集軌跡資訊或其他先驗資訊,室內結構也不需要符合曼哈頓世界假設。
相關專利:
- [1] 中國專利申請 No. 201910967622.4: " 一種室內建模方法、裝置及終端設備”, 12 October 2019, Shi, W.; Wu K.